ML/RL & Microrobotics
← HomeI started my Ph.D. thinking I would be working on system's integration and autonomy for microrbotic platforms. A bit of a tangent emerged into model-based reinforcement learning, yet now some more interest is coming to merge these directions within my research group. I wrote a memo on open questions and investigations in this area. I thought some of my followers could be interested in the thought process of applying ML/RL to a novel research area, so I am sharing a lightly edited version here (remove links to open overleaf documents, etc.). Feel free to reach out if you are interested in contributing seriously.
The topics covered in this post follow:
- The motivation of why this is an interesting problem at multiple levels of the stack,
- My contributions, both published and unpublished,
- The many paths we have going forward from here.
1. Motivation: We have almost no data, it is hard to understand what we have
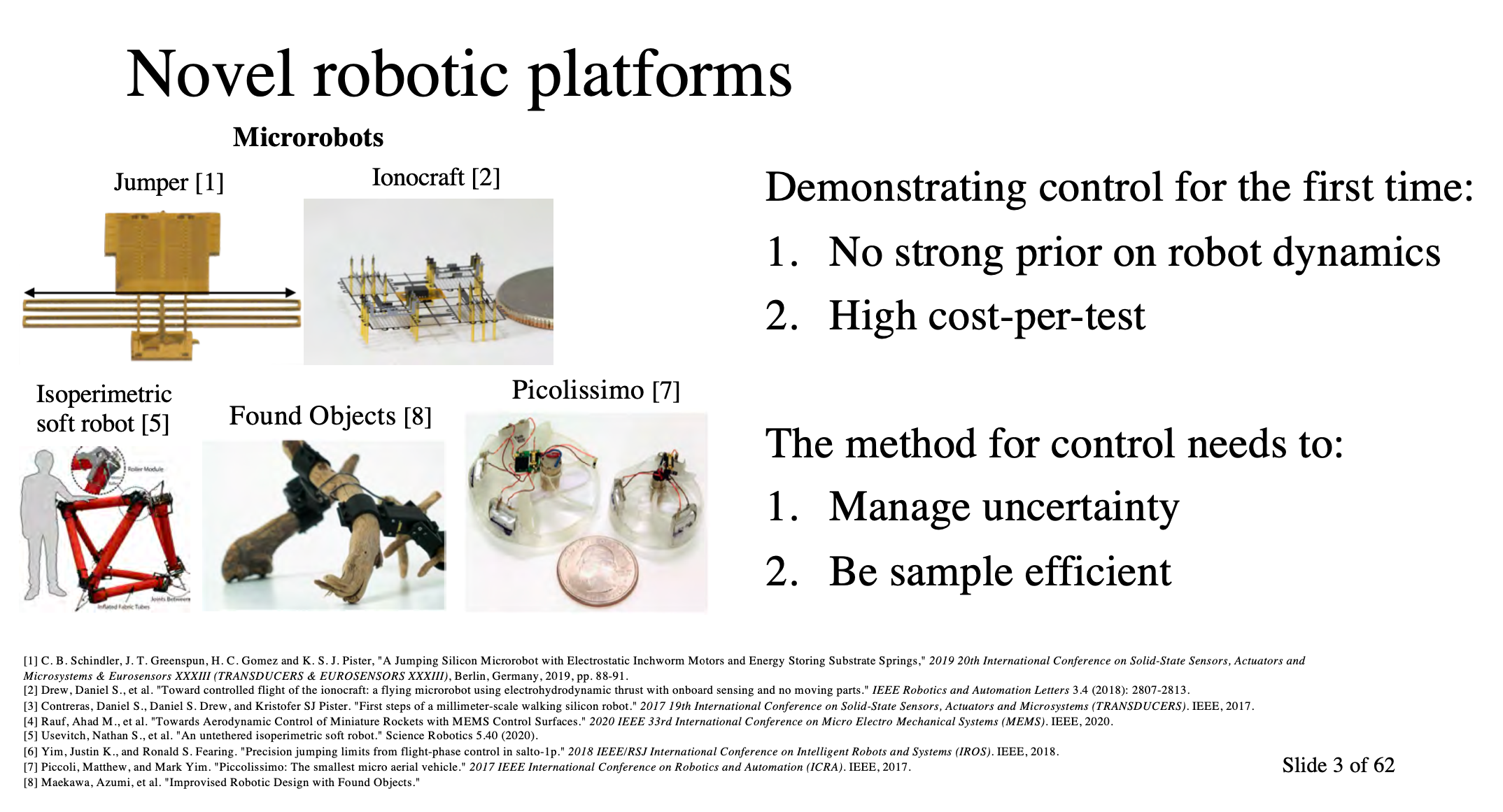
Microrobotics, and any Microsystems research, has a very different publication pathway than most of computer science research. The problem is primarily getting something to work once. This can be exemplified in two ways: fabrication / yield problems and testing / experimental problems. The ionocraft has a simple fabrication process but was hard to test (and assemble), but now the MEMs devices for the motors have a more complicated process (due to many, many more moving parts and constraints), but assembly and testing is a bit lower risk.
Therefore, given that one of these data constraints is likely to always exist we want a method to be extremely sample efficient. When Googling this, I don’t even think sample efficient is the right word, because we are not doing theoretical work where we want it to be more sample efficient, we need it to be so, or we will not solve the task. I call this in my work minimum-data reinforcement learning.
Second is an unavoidable problem of cutting edge research. With microrobotics, we will likely never have a perfect model of the dynamics. Our simulations will never be perfect. We do not operate like TSMC & ASML. Therefore, we want methods (or students), but hopefully methods, that and learn from data and reason with uncertainty to update the design and or control. Progress in machine learning and deep learning particularly has shown a ton of promise in utilizing function approximation for complex tasks and datasets.
Historically, model-based methods have filled the void of sample-efficient and handling uncertainty for people. This is where I started. If you want to watch a talk with a intro to why microrobots, you can see one of my last practice quals or the beginning of a seminar I gave at Cornell, slides.
More links for microrobotics
I did a quick search for a review paper on recent advancements in microrobotics, but I did not find one. In that stead, I have made a list of some of the robots I know of (feel free to ping me if I should add any!). Many of these are paywalled, let me know if you need access:
- Ionocraft (UC Berkeley), un-named follow up (U. Washington)
- Walking microrobots (UC Berkeley)
- Robobee (Harvard), follow-ups are plentiful
- Magnetic-stimulated swimmer (DGIST & Korean schools)
- Jumping robot (UC Berkeley), laser powered jumper (UC Berkeley), older version (UC Berkeley)
2. History: Model-based Reinforcement Learning (MBRL) as a case study
This is the level of the stack where I took a total leap of faith in the spring of 2018. We wanted to control the ionocraft because a) it is super hard to do with any method and b) would be super cool to use a learning method rather than struggling through hand PID tuning. This turned into controlling a quadrotor, which was the closest system we could come up with.
Starting with class projects in SP18 (Hybrid Systems with Claire Tomlin and Machine Learning with Anant Sahai) I proceeded to continue working on this over the summer, while helping Dan and Kris with the Ionocraft. In the FA18 Deep RL course, the project was starting to take form. After a rejected version at ICRA that year, the final version was accepted into IROSthe following spring. So, it took a solid year+ of work to get this out the door (looking at the versions is interesting, but mostly to show the process this can take if you want to take a leap of faith and try to work on this).
Now, there is way more support of projects in this vein. There is more work on it directly with Kris and the old guard and some M.S. students. There is work I have had generous opportunities to work with Roberto Calandra on external to Berkeley (example, example). Working on this stuff has opened a lot of doors for me, it’s really exciting. There is generally a lack of people a) willing to work on it seriously and b) with a certain niche of skills that makes them useful — for all of you that is easily microrobotics and related EE hardware design.
3. Future Work: optimization across the stack of novel robotics
I have ordered these in what I view as most possible in a learning side to least possible. The X-factor of applying these to hardware makes this tricker. For example, doing any control synthesis on hardware is a huge win, and I would love to work on this for something like the walking robot. It seems like the timeline for this does not overlap with my critical path, so this may turn into a collaboration at whatever job I get next (hopefully industry research that allows collaborations).
Here is a short summary of problem spaces I discuss:
- Black box optimization: data-driven optimization of design where human tuning parameters is hard (high dimensions, nonlinear);
- Morphology learning: specific design optimization applied to how a robot will move and or how it operates;
- Co-adaptation: jointly optimizing the robot design and the downstream controller for single- or multi-task control;
- Multi-agent control: applying our background in swarms to high-dimensional control tasks (kind of a long shot);
- Controller synthesis: continuing some of my algorithmic work on model-based RL for controlled generation (kind of a long shot as well);
Black box design optimization
There is also a white paper I started that someone could take over, and potentially turn into a high-impact paper with any real world results (pdf). It is the idea of using machine learning to optimize design. We have a metric function we want to optimize, this takes the high-dimensional optimization off your hands.
In the past I even made a GitHub repo to try and make it easier to onboard people here.
Linking to some of the work I have done in model-based RL, there is some recent works on model-based optimization of design. Microrobots / real hardware are way more interesting than what has been done, but would likely be worth starting in a simulator. Kris can chime in with some talks he made 20+ years ago on Sugar and accurate MEMs simulation.
Example deliverable: Optimize yield of MBRL robots with human-computer joint design optimization.Morphology learning & co-adaptation
I broke morphology off into its own category because it is much more focused on locomotion and structural design of how it operates, rather than just optimizing an arbitrary MEMS function (it is a subset of above). Kris has already had multiple generations of undergrads working on things related to this (for example, here is work from Brian Yang and Grant Wang on gaits— they presented it at one of the first group meetings I attended in graduate school). Co-adaptation is when you include the controller design in the problem formulation (a bit more advanced). Roberto has a lot more work here (some with Kris, some ongoing with me and Mark): example 1 example 2.
Example deliverable(s): Apply a black-box optimization task to an already existing robot structure (leg length, number of legs, motor force, etc.) and show performance tuning over iterations; Apply an existing MBRL algorithm to joint optimization of design and control on a simulated Microrobot control task.Bridging multi-agent learning and hierarchical control
Something that the framing of working on microrobots gives you is a fundamental expectance of multi-agency. What I mean here is: anyone working on microrobots bakes into the motivation of their work that eventually we will make a lot of these. Therefore, any method we have to control them must be able to hand high-dimensional input spaces (many agents). There is a fundamental problem in model-based RL methods that they have not solved higher dimension tasks. Therefore, there is potential high impact work with a potentially different approach: break down the complicated control problem for one agent as if different sections are sub-agents in a multi-agent control problem.
This came up when discussion BotNet (code, paper) and our continued working group on multi-agent control.
Example deliverable: use hierarchical / partially centralized MBRL to control the Humanoid environment.Control synthesis
This work would be addressing many of the open questions in model-based RL research. There is plenty to do, but it may be easier to learn and enter from starting in another area with lower hanging fruit (application work).
Example deliverable(s): apply MBRL to a walking real-world hexapod; developing further sample-efficient MBRL algorithms by considering objective mismatch.